Restoring a 1984 Tomy Omnibot
What if a robot from the 1980s could see?
This project explores that idea by upgrading a vintage Omnibot, originally programmed using cassette tapes, with modern computer vision. The goal is to give the robot the ability to detect objects and respond to them in real time.
This project is a collaboration between Mario The Maker and PLACITECH, combining robotics, electronics, and AI.
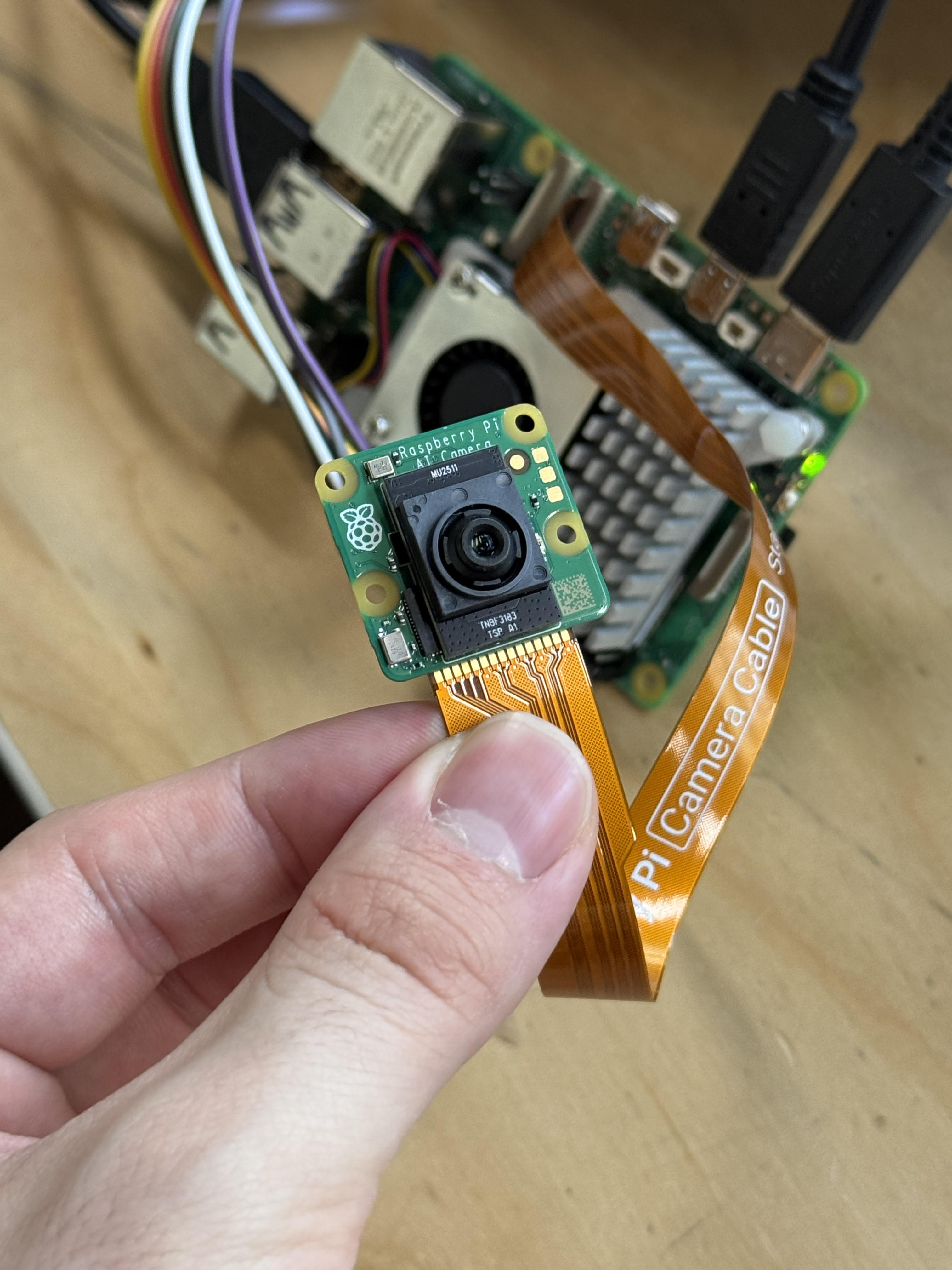
To do this, we will design custom modules that mount onto the robot and house a Raspberry Pi, a custom-built battery pack, and a voltage regulation system for portable operation.
This is still a work in progress, and Maker Faire will be part of the testing process. Visitors will be able to interact with the robot and see how it performs in a real-world environment.






Mario the Maker x PLACITECH
This project is a collaboration between Mario The Maker and Alessandro Placitelli (PLACITECH).
Mario The Maker is a creative technologist, maker, and the organizer of Maker Faire Miami, known for building interactive systems that combine robotics, fabrication, and community.
Alessandro Placitelli is an engineering content creator focused on developing original electronics projects that combine hardware, design, and clear, accessible explanations. His work centers on building functional systems from scratch while documenting the process for a global audience.
More Event Info
More Project Info
https://mariothemaker.com/posts/tomy-omnibot-restoration.html
What inspired you to make this project?
This project was inspired by the idea of combining old and new technology to create something unexpected. The Omnibot is a robot from the 1980s that was originally programmed using cassette tapes, which felt like a perfect starting point to explore how far modern tools have come.
At the same time, we wanted to see what would happen if we pushed that original design beyond its intended capabilities. By adding computer vision and modern electronics, the goal is not just to upgrade the robot, but to reimagine what it could do today.
It’s also driven by curiosity. We don’t fully know how well everything will work together yet, and that uncertainty is part of what makes the project interesting.
What are some of the challenges you have encountered and how did you address them?
One of the main challenges has been integrating modern electronics into a system that was never designed for them. The Omnibot is a 40-year-old robot with its own limitations, so adapting it to work with a Raspberry Pi and computer vision required rethinking how different parts of the system communicate.
Another challenge was designing a reliable portable power system. To address this, we built a custom lithium-ion battery pack with a battery management system and used a voltage regulator to ensure stable power for the Pi.
Mechanical limitations were also a factor, especially with components like the wheels, which had degraded over time. We solved this by redesigning and 3D printing replacement parts.
Overall, the approach has been to iterate quickly, test each subsystem independently, and refine the design as new challenges come up.